|
О сайте Регистрация Обратная связь Реклама на сайте Публикации на сайте Карикатуры |
|
|
|
|
| Проблемы информатизации : Робототехника |
20.07.2013. Развитие морской робототехники в России и за рубежом
Содержание обзора. Список сокращений. Введение. 1. Вопросы терминологии и классификации. 2. Исторический экскурс. 2.1. Развитие МРТ за рубежом. 2.2. Развитие отечественной МРТ. 3. Особенности и перспективы применяемых технологий. 3.1. Связь и взаимодействие. 3.2. Навигация. 3.3. Движители. 4. Применение МРТ в военных целях. 5. Применение МРТ при работах на шельфе. 6. Беспроводные сенсорные сети и их применение в море. 7. Сообщества взаимодействующих роботов 8. Морская робототехника + дополненная реальность. Заключение. Литература. Приложения. Приложение 1. «Каталог отечественных и зарубежных ТНПА». Приложение 2. «Каталог отечественных и зарубежных АНПА». Список сокращений. АНПА – автономный необитаемый подводный аппарат ТНПА – телеуправляемый необитаемый подводный аппарат ИНС – инерциальная навигационная система ГАНС – гидроакустическая навигационная система ГАНС ДБ – ГАНС с длинной базой ГАНС КБ – ГАНС с короткой базой ГАНС УКБ – ГАНС с ультракороткой базой НПА – необитаемый подводный аппарат ППА – приемо-передающая антенна ОПА – обитаемый подводный аппарат AR (augmented reality) – дополненная реальность AUV (autonomous underwater vehicle) – автономный подводный аппарат ROV (remotely operated vehicle) – дистанционно управляемый аппарат (двигающийся) SAUV (sun autonomous underwater vehicle) – АНПА на солнечной батарее UUV (Unmanned Underwater Vehicle) – необитаемый подводный аппарат USV (Unmanned Surface Vehicle) – необитаемый надводный аппарат UXV (Unmanned Generic Vehicle) – необитаемый аппарат общего (любого) класса Введение Если в детстве вы потеряли иголку в стоге сена, то найдете ее, в лучшем случае, к моменту выхода на пенсию. Но если на решение этой задачи мобилизовать обитателей ближайшего муравейника, то иглу вам принесут через две минуты. Проверено не раз. Если же с муравьями договориться не удалось, то можно привлечь студентов технического вуза, увлеченных робототехникой. Им вполне по силам создать группу миниатюрных устройств, оснащенных магнитными датчиками, способных передвигаться и взаимодействовать друг с другом. Создание роботов, способных взаимодействовать друг с другом в целях наиболее эффективного решения поставленной задачи — это новое направление в развитии робототехники, названное «стайные роботы», апологеты которого обещают прямо таки революцию в решении множества трудоемких задач. О стайных роботах речь пойдет в предпоследней главе нашего обзора. Кстати, если стайных роботов лишить возможности передвигаться, то мы перейдем к другой, тоже перспективной, но предшествующей им по времени, научно-практической теме — к теме беспроводных сенсорных сетей. На этом направлении уже достигнуты интересные практические результаты. Принципы построения и примеры реализации сетей мы представим в 6-й главе обзора. Тем временем, пора вспомнить, что наш обзор посвящен применению робототехники именно в море, а не на суше или в поднебесье, т.е. придется представить себе поиск иголки не в стоге сена, а на плантации водорослей, что покажется задачей более трудоемкой. В воде практически не работает Wi-Fi, крайне затруднено распространение электромагнитных волн, сложно использовать оптический канал, т.е. вопросы связи, взаимодействия, навигации, наблюдения и пр. приобретают свою, сугубо морскую специфику. Особенностям реализации связи, взаимодействия, навигации, движителей, сенсоров и манипуляторов в морских роботах посвящена 3-я глава обзора. Современные робототехнические системы находят применение практически во всех областях подводно-технических работ. Однако главными сферами их применения являются: военная, работы по добыче и транспортировке топливно-сырьевых ресурсов, поисково-спасательные работы и океанологические исследования. С особенностями их использования в этих областях и примерами применения можно ознакомиться в 4 – 5 главах обзора. Именно в этих областях в последние годы достигнут наибольший прогресс в части применения новых технологий связи и навигации подводных аппаратов, оснащения новыми датчиками и манипуляторами, повышения эффективности управления и технического обслуживания. В Приложении представлен каталог современных ТНПА и АНПА. Так почему же мы не видим на полях страны роботов, ищущих иглы в стогах? Да потому, что никто не ставил перед ними таких задач. Видимо иглы перестали теряться. А если говорить серьезно, то постановка задач, выработка сценариев по использованию робототехники в решении практических проблем, в том числе и с учетом перспектив развития этого направления, является важнейшей организационной задачей. Недаром, в планах Пентагона на ближайшие годы проектам по выработке концепций применения робототехники в армии придается такая же важность, как и проектам по разработке самих роботов. Более того, они имеют приоритет, так как способны придать стимул и определить направление проектирования роботизированных систем. Свои предложения по этому вопросу и другим проблемам развития морской робототехники (МРТ) в России мы представим в Заключении к данному обзору. Освоение глубин Мирового океана – задача не менее сложная и опасная, чем освоение космического пространства. А по экономической и экологической важности даже более приоритетная. В решении этой задачи морская робототехника призвана играть роль не просто помощника человека, а полноправного участника, так как должна не просто сделать глубины океана более доступными и безопасными для человека, но взвалить на свои плечи основной объем работ по их изучению и освоению. 1. Вопросы терминологии и классификации. В области морской робототехники пока не выработано единой общепризнанной терминологии. Некоторые специалисты используют словосочетания, где базовым является слово «робот», например: морские роботы, морская робототехника, робототехнические комплексы или системы и пр. Другие стремятся обойтись без термина «робот», упирая на более этимологически внятные словосочетания, например «необитаемый подводный аппарат» (НПА). В данном обзоре мы будем придерживаться терминологии, вышедшей из трудов М.Д Агеева и его коллег по Институту проблем морских технологий ДВО РАН, который он возглавлял с 1988 по 2005г., отдавая дань их вкладу в развитие отечественной морской робототехники. Это такие термины, как «необитаемый подводный аппарат» (НПА), «телеуправляемый необитаемый подводный аппарат» (ТНПА), «автономный необитаемый подводный аппарат» (АНПА) и ряд других. Вместе с тем, в тексте вы встретите и всевозможные «роботизированные» термины, дабы не искажать идей и выводов авторов, использовавших их в своих работах. Как бы там ни было, мы не видим здесь большого противоречия, ведь НПА – это всего лишь аппарат, работающий под водой (или на поверхности моря, или даже над водной гладью – морской беспилотник), а роботизированный комплекс или система – это уже и судно поддержки и м.б. система навигационных маяков, без которых аппарат не может обойтись для выполнения своей миссии. Так что разнообразие в терминологии, мы надеемся, никого не введет в смущение. Все должно быть ясно из контекста. В зарубежных источниках по данной теме также не наблюдается единообразия. Чаще других используется термин ROV (remotely operated vehicle) – дистанционно управляемый аппарат (двигающийся) или вместо vehicle – vessel, т.е. судно. Используются также такие аббревиатуры, как UUV (Unmanned Underwater Vehicle) – необитаемый подводный аппарат, USV (Unmanned Surface Vehicle) – необитаемый надводный аппарат, UXV (Unmanned Generic Vehicle) – необитаемый аппарат общего (любого) класса и пр. При этом авторами допускается весьма вольное толкование этих терминов, особенно ROV. Встречаются и другие, близкие по семантике, термины и аббревиатуры, на которых мы не будем сейчас заострять внимание. В любом случае вы всегда сможете воспользоваться разделом «Список сокращений» данного обзора. Классификация. Классификация в любом научном направлении является концептуальным вопросом как в части взаимодействия специалистов, так и в плане развития этого направления. Разнообразие созданных в мире НПА затрудняет их строгую классификацию. Тем не менее, предложены некоторые классификационные схемы, на которые можно опираться. Во-первых, общеизвестно разделение подводных аппаратов на обитаемые и необитаемые – ОПА и НПА. Обитаемые аппараты могут быть гипербарическими и нормобарическими (прочный корпус защищает гидронавтов от давления воды). Далее эти две подгруппы делятся на автономные и привязные. Необитаемые аппараты, в первую очередь разделяются на телеуправляемые и автономные. Чаще всего в качестве классификационных признаков морских РТК (НПА) используют массу, габариты, автономность, способ передвижения, наличие плавучести, рабочую глубину, схему развертывания, назначение, функциональные и конструктивные особенности, стоимость и некоторые другие [3]. •Классификация по массогабаритным характеристикам:
Классификация по особенностям формы несущей конструкции:
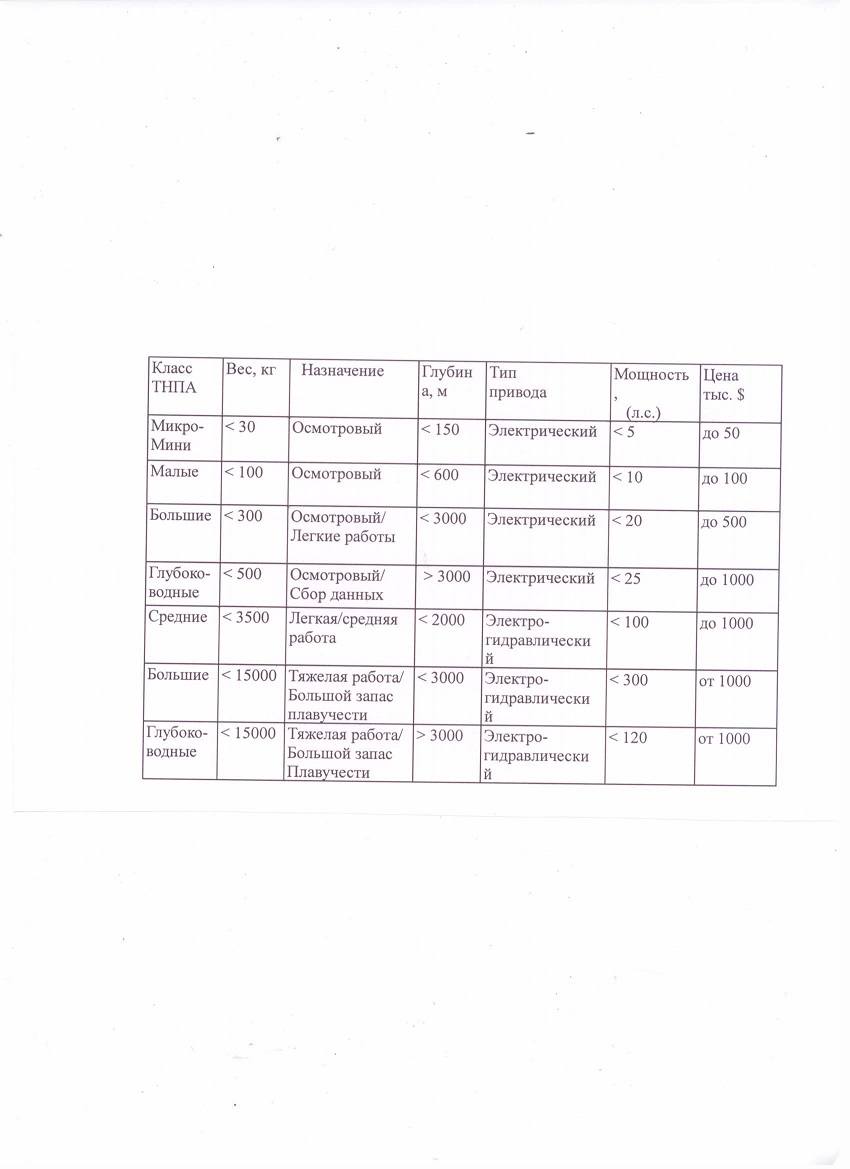
Классификация морских РТК (НПА) по степени автономности. АНПА должен отвечать трем основным условиям автономности: механической, энергетической и информационной. - Механическая автономность предполагает отсутствие какой-либо механической связи в виде кабеля, троса или шланга, связывающих ПА с судном-носителем либо с донной станцией или береговой базой. - Энергетическая автономность предполагает наличие на борту ПА источника питания в виде, например, аккумуляторных батарей, топливных элементов, ядерного реактора, двигателя внутреннего сгорания с замкнутым рабочим циклом и т. п. - Информационная автономность НПА предполагает отсутствие информационного обмена между аппаратом и судном-носителем, либо донной станцией или береговой базой. При этом НПА должен иметь и автономную инерциальную навигационную систему. •Классификация морских РТК (НПА) по информационному принципу для соответствующего поколения НПА. - Морские автономные РТК ВН (АНПА) первого поколения функционируют по заранее заданной жесткой неизменяемой программе. Дистанционно управляемые (ДУ) НПА первого поколения управляются по разомкнутому контуру. В этих простейших устройствах команды управления подаются непосредственно в движительный комплекс без использования автоматических обратных связей. - АНПА второго поколения имеют разветвленную сенсорную систему. Второе поколение ДУНПА предполагает наличие автоматических обратных связей по координатам состояния объекта управления: высоте над дном, глубине погружения, скорости, угловым координатам и т. п. Эти очередные координаты сравниваются в автопилоте с заданными, определяемыми оператором. - АНПА третьего поколения будут обладать элементами искусственного интеллекта: возможностью самостоятельного принятия несложных решений в рамках общей поставленной перед ними задачи; элементами скусственного зрения с возможностью автоматического распознавания простых образов; возможностью к элементарному самообучению с пополнением собственной базы знаний. ДУНПА третьего поколения управляются оператором в интерактивном режиме. Система супервизорного управления предполагает уже некую иерархию, состоящую из верхнего уровня, реализуемого в ЭВМ судна-носителя, и нижнего уровня, реализуемого на борту подводного модуля. •В зависимости от глубины погружения обычно рассматривают: мелководные НПА с рабочей глубиной погружения до 100 м, НПА для работ на шельфе (300–600 м), аппараты средних глубин (до 2000 м) и НПА больших и предельных глубин (6000 м и более). •В зависимости от типа движительной установки можно различать НПА с традиционной винторулевой группой, НПА с движительной установкой на бионических принципах, с водометными движителями и АНПА – планеры с движительной системой, использующей изменение дифферента и плавучести [3]. В свою очередь, винторулевые НПА разделяются на электрические и электрогидравлические. Особенности различных движителей рассмотрены в разделе 3.3. Кроме того в ряде работ НПА разделяют на осмотровые и рабочие. В первую очередь это относится к ТНПА. Под осмотровыми ТНПА подразумевают легкие и средние аппараты, предназначенные для осмотра, подводной съемки, исследований с помощью различных датчиков, а под рабочими – тяжелые, весом до нескольких тонн, ТНПА, предназначенные для выполнения работ с помощью манипуляторов и различных инструментов, а также для подъема грузов. В работе [4] приводится следующая классификационная таблица ТНПА.
В этой классификации никак не отражены новые веяния в части бесконтактных сенсорных сетей («умный планктон») и стайных роботов, но это, видимо, дело ближайшего будущего. Когда появятся примеры воплощения этих технологий в реальных морских проектах, тогда и классификация сумеет подстроиться. В настоящем обзоре мы в равной степени уделяем внимание ТНПА и АНПА. У каждого из этих видов морской робототехники есть своя специфическая сфера применения, что напрямую связано с характерными для каждого вида достоинствами и недостатками. Главное достоинство ТНПА в том, что он связан кабелем с судном поддержки, т.е. энергетически и информационно полностью обеспечен. Он может работать под водой сколь угодно долго, оперативно управляться оператором с борта несущего судна, и нести на себе большой груз – инструменты, мощные манипуляторы, осветительную аппаратуру. По сути ТНПА можно отнести к робототехнике только с большой натяжкой, скорее, это дистанционно управляемый инструментальный комплекс. ТНПА выполняют наибольший объем осмотрово-поисковых, спасательных, ремонтных и строительных работ. Вместе с тем, жесткая привязка к судну-носителю является и главным недостатком ТНПА, не позволяющим им выполнять функции, связанные с автономной работой, например, скрытная разведка, диверсии, проникновение в пространства, где внешний кабель стал бы помехой. Да и сеть датчиков или подвижных аппаратов для работы на больших площадях из ТНПА не построишь. Поэтому и у АНПА есть своя довольно обширная сфера деятельности. К сожалению, у АНПА есть, как минимум два серьезных недостатка. Это подводная связь и ограниченный энергетический ресурс, да и подводная навигация оставляет желать лучшего. Научные работы по решению этих проблем ведутся достаточно активно, о чем будет рассказано в соответствующих разделах обзора, и если они принесут практические результаты, то это придаст мощный дополнительный стимул развитию морской робототехнике. 2. Исторический экскурс. 2.1. Развитие МРТ за рубежом. Началом производства и использования необитаемых подводных аппаратов за рубежом можно считать конец 50-х, начало 60-х годов прошлого века, когда ВМС США всерьез взялись за развитие данного направления. Так в начале 60-х годов была создана очень удачная модель ТНПА, которую можно считать прообразом всех современных привязных подводных аппаратов. Аппарат назывался Cable-Controlled Underwater Research Vehicle (CURV) и имел трубчатую раму с четырьмя торпедообразными плавучестями и общей длиной 3,3 м, шириной и высотой по 1,2 м. Движительный комплекс состоял из трех двигателей мощностью по 10 л.с. На борту находились: гидролокатор и гидрофон, ТВ-камера и светильники, а также фотокамера под пленку 35 мм. CURV был оборудован 7-функциональным манипулятором со схватом, позволяющим захватить крупные предметы цилиндрической формы. Все приводы, в том числе и двигателей, были гидравлическими [4]. Глубина погружения CURV составляла 600 м. В последствии были созданы модификации CURV II и CURV III с глубиной погружения до 6000 м. CURV и его модификации подняли со дна сотни торпед, участвовали в поисково-спасательных операциях. Одна из таких операция состояла в поиске и подъеме водородной бомбы с глубины 869 м в районе Паломареса (Испания) в 1966г. В 70-е годы к созданию необитаемых подводных аппаратов активно подключились Великобритания и Франция, а с конца 70-х и особенно в 80-е годы в гонку активно включились Германия, Норвегия, Канада, Япония, Голландия, Швеция. И если изначально производство НПА финансировалось государством, а использование ограничивалось, в основном, военной сферой, то уже в 80-е годы основной объем их производства стал приходиться на коммерческие компании, а сфера применения распространилась в область бизнеса и науки. Это было связано, в первую очередь, с интенсивным освоением шельфовых месторождений нефти и газа. В 90-е годы НПА перешли барьер глубины в 6000 м. Японский ТНПА JAMSTEC Kaiko достиг в Марианской впадине глубины 10 909 м. В 2008г. военно-морской флот США начал замену спасательных систем, управляемых пилотом, на модульные системы, основанные на необитаемых дистанционно управляемых аппаратах. Появление на рынке большого разнообразия моделей НПА привело к активному поиску новых сфер их применения, а это, в свою очередь, нашло отклик со стороны разработчиков и производителей НПА. Такой взаимообразный процесс, стимулирующий развитие данного направления, происходит и сейчас. В настоящее время на зарубежном рынке морской робототехники функционирует более 500 компаний-производителей НПА из самых разных стран, включая даже такие, как Исландия, Иран и Хорватия. 2.2. Развитие отечественной МРТ. В нашей стране создание необитаемых подводных аппаратов началось примерно в те же годы, что и за рубежом. В Институте океанологии в 1963г. началась разработка , а в 1968г. появились ТНПА «КРАБ» и «Манта 0,2», оснащенные телекамерой и манипулятором. Существенный вклад в развитие морской робототехники в разное время внесли такие организации, как:
В настоящее время активно работает на российском рынке ОАО «Тетис Про», предоставляющее российским потребителям продукцию ведущих зарубежных производителей, осуществляющее их локализацию и техническую поддержку. Институт проблем морских технологий ДВО РАН был создан в 1988г. на базе отдела подводных технических средств ИАПУ ДВНЦ АН СССР. В разное время в институте были созданы АНПА «Скат», «Скат-гео», «Л-1», «Л-2», «МТ-88», «Тифлонус», «ОКРО-6000», «CR-01А», «Клавесин», малогабаритный «Пилигрим», АНПА на солнечных батареях (САНПА); ТНПА серии «МАКС» (малогабаритный аппарат с кабельной связью). Всего за период 1974-2010гг. было создано более 20 необитаемых подводных аппаратов различного назначения. Аппараты, созданные в институте, использовались в спасательных операциях, для поиска затонувших объектов, обследования подводных сооружений: трубопроводов, опор платформ и причальных сооружений. Уникальная операция в Саргасовом море по поиску и обследованию атомной ПЛ «К-219», затонувшей в 1987г. на глубине 5500 м, была первой в мире глубоководной операцией, осуществленной исключительно автономным необитаемым подводным аппаратом («Л-2»). Созданный робототехнический комплекс использовался для обследования района гибели АПЛ "К-8" в северной Атлантике и при поиске пассажирского южно-корейского самолета в районе о. Сахалин. В 1989 г. аппарат "Л-2" участвовал в проведении поисково-спасательных работ в Норвежском море в районе аварии АПЛ "К-287" ("Комсомолец"). В 1990г. АНПА «МТ-88» получил в Сан-Диего (США) международный диплом INTERVENTION/ROV'90 первой степени за лучшую работу года и вклад в прогресс мировой подводной робототехники. В институте океанологии, как уже было сказано выше были созданы первые отечественные ТНПА серий «КРАБ» и «Манта». В МВТУ им. Баумана исследования по созданию подводной техники начались еще в конце 60-х годов на кафедре СМ-7. И по сей день кафедры «Океанотехника» и «Подводные роботы и аппараты» готовят специалистов по разработке подводных аппаратов. В инженерном центре «Глубина» совместно с преподавателями и студентами кафедры «Подводные роботы и аппараты» был создан многофункциональный ТНПА «Калан». Кстати, Инженерный центр «Глубина» в начале 90-х разработал еще один малогабаритный осмотровый ТНПА «Белёк». ЦНИИ «Гидроприбор» отметился разработкой ТНПА «ТПА-150», «ТПА-200» и «Рапан». Однако, в процессе эксплуатации в «Рапане» был выявлен ряд недостатков и его использование было прекращено. В 1990г. на рынке появилась ленинградская фирма ЗАО «Интершельф-СТМ» со своими разработками ТНПА, которыми в последствии были оснащены суда «Экопатруль». В 1998г. эта организация по заказу компании Exxon выполнила работы по исследованию больших участков дна в рамках проекта разработки шельфовых нефтегазовых месторождений. ГНЦ «Южморгеология» базируется на побережье Черного моря, в 40 км от Новороссийска. Эта организация является разработчиком и обладателем трех ТНПА «RT-1000 PLI», «PTM 500» и «PT 6000M». С помощью этих аппаратов был выполнен целый ряд подводно-технических работ: поиск захоронений химического и бактериологического оружия в Балтийском море, осмотр нефтяных трубопроводов, осмотр выпускных коллекторов очистных сооружений и пирсовых сооружений порта в Черном море, работа на затонувших объектах - «Адмирал Нахимов» и АПРК «Курск», осмотр прибрежной части подводного трубопровода «Голубой поток», поиск и подъем черных ящиков аэробуса А-320, потерпевшего катастрофу под г.Сочи и ряд других работ. ООО «Индэл-Партнер», образованное в 2001г. хорошо известно, благодаря своим миниатюрным и недорогим (3-7 тыс. долл.) ТНПА осмотрового класса серий ГНОМ и «Обзор». Эти аппараты широко используются для подводных съемок, наблюдения за рыбами и обитателями дна, осмотра затонувших судов и поиска различных объектов. ГНОМы закуплены и успешно эксплуатируются службами МЧС РФ, Генпрокуратуры РФ, Росэнергоатома, крупными нефтяными и газовыми компаниями, водолазами и дайверами. ФГУП «ОКБ Океанологической техники РАН» - еще один известный производитель разнообразной подводной техники, в 2006г. разработал и произвел многоцелевой ТНПА рабочего класса ROSUB 6000 с глубиной погружения до 6000 м. Вес аппарата -2500 кг, полезная нагрузка -150 кг. ОАО «Тетис Про». В 2010 году спасательные силы Черноморского флота России приняли на вооружение новый телеуправляемый автономный необитаемый подводный аппарат "Обзор-600", созданный российской компанией "Тетис-ПРО". Ранее российский флот использовал АНПА британского производства. Речь идет об аппаратах Tiger и Pantera+ производства компании Seaeye Marine. "Обзор-600" относится к классу малых АНПА и способен работать на глубине до 600 метров. Масса аппарата составляет 15 килограммов. "Обзор-600" оснащен манипуляторами, которые позволяют осуществлять захват груза массой до 20 килограммов. Благодаря небольшим размерам, АНПА может проникать в сложные или узкие конструкции под водой. 3. Особенности и перспективы применяемых технологий. 3.1. Связь и взаимодействие. Очевидно, что в данном разделе речь пойдет исключительно о связи и взаимодействии автономных подводных аппаратов (АНПА), т.к. ТНПА связаны с судном поддержки по кабелю, а поверхностные аппараты - по радиоканалу. В связи с тем, что электромагнитные волны в воде быстро затухают, связь по радиоканалу в диапазоне КВ и УКВ возможна частично только на перископной глубине. Подводным роботам, призванным к работе на глубине это не интересно. Исследования, проводившиеся, в первую очередь, в интересах военного подводного флота, показали, что из известных в природе физических полей наибольший интерес для решения проблемы связи с подводными объектами представляют:
Было решено, что резервная связь с ПЛ, находящимися под водой в любой точке мирового океана наиболее реальна с помощью антенн, излучающих сверхдлинные волны [7]. Были построены многокилометровые антенны в США, в районе Великих озер и у нас на Кольском полуострове. В диапазоне КНЧ возможна односторонняя посылка сообщения и его прием в любой точке океана, но … одного короткого слова в течение … 5-20 минут. Понятно, что такая односторонняя связь может использоваться только как резервная, для передачи, например, экстренной команды «всплыть и связаться с центром любым доступным образом». Поэтому на сегодняшний день единственным способом связи НПА с поверхностью или с другими подводными аппаратами является акустическая связь в низкочастотном диапазоне. В качестве примера можно привести акустический приёмо/передающий модем LinkQuest UWM 4000 для подводной связи фирмы LinkQuest. На сегодняшний день это одно из наиболее совершенных и востребованных изделий, благодаря: усовершенствованной схеме модуляции для улучшения отношения сигнал-шум; стабилизации канала связи для борьбы с множественным переотражением сигнала; кодированию с коррекцией ошибок; автоматической адаптации скорости передачи для борьбы с изменяющейся шумовой обстановкой в окружающей среде. Однако, и на такой скорости невозможно передавать значительные объемы информации. Можно только передавать команды или обмениваться небольшими файлами. Чтобы передать фото- или видеоизображение, или перекачать в центр обработки массив накопленных данных, АНПА необходимо всплыть и воспользоваться радио или спутниковой связью. Для этого на борту большинства современных аппаратов (кроме специализированных донных сетевых датчиков) имеются необходимые средства связи. Так, например, в АНПА Gavia модуль связи и управления обладает следующими возможностями:
Подводная оптическая связь. По сравнению с воздухом, вода непрозрачна для большей части спектра электромагнитных волн, за исключением видимого диапазона. Более того, в самых чистых водах свет проникает вглубь лишь на несколько сотен метров. Поэтому в настоящее время под водой используется акустическая связь. Акустические системы передают информацию на достаточно большие расстояния, но все же отстают по времени передачи из-за относительно малой скорости распространения звука в воде. Ученые и инженеры из Woods Hole Oceanographic Institution (WHOI) разработали оптическую систему передачи информации, которая компонуется с уже существующей акустической системой. Такой способ позволит передавать данные со скоростью до 10-20 мегабит в секунду на расстояние 100 метров, используя маломощную батарею и недорогие приемник и передатчик. Изобретение позволит подводным аппаратам, оборудованным всеми необходимыми для этого устройствами, передавать на поверхность воды мгновенные сообщения и видео в режиме реального времени. Отчет компании был представлен 23 февраля 2010 года на собрании Ocean Sciences Meeting в Портленде (Portland Ore). Когда же судно уходит на такую глубину, когда оптическая система уже не работает, вступает акустика. Фарр сравнил возможности технологии с теми, которые открыли миру wi-fi системы, а исследователь Мойрайс Тиви (Maurice Tivey) из WHOI добавил: «подводные оптические системы подобны беспроводным системам в сотовой связи». И, пожалуй, здесь нет преувеличения. Материал о результатах испытаний этой технологии появился на сайте WHOI только в июле 2012 года. Видимо, создатели так долго решали какие-то коммерческие вопросы или вопросы авторских прав. Сообщалось, что в оптическом модеме использовался голубой свет, т.к. другие световые волны хуже распространяются в воде, и была осуществлена передача видео изображения со дна моря в режиме, «близком к реальному времени», на расстояние до 200 метров. Также сообщалось, что создатели технологии образовали альянс с компанией Sonardyne для коммерческого продвижения своего продукта, который назвали BlueComm [7]. Для справки приведем основные базовые сведения по беспроводной оптической связи в воздухе. Технология беспроводной оптики (Free Space Optics-- FSO) известна достаточно давно: первые эксперименты по передаче данных с помощью беспроводных оптических устройств были проведены более 30 лет назад. Однако ее быстрое развитие началось с начала 1990-х гг. с появлением широкополосных сетей передачи данных. Первые системы производства компаний A.T.Schindler, Jolt и SilCom обеспечивали передачу данных на расстояния до 500 м и использовали инфракрасные полупроводниковые диоды. Прогресс подобных систем сдерживался в основном из-за отсутствия надежных, мощных и "скорострельных" источников излучения. В настоящее время такие источники появились. Современная технология FSO поддерживает соединения до уровня ОС-48 (2,5 Гбит/c) с максимальной дальностью до 10 км, а некоторые производители заявляют о скорости передачи данных до 10 Гбит/с и расстояниях до 50 км. При этом на показатель реальной максимальной дальности оказывает влияние доступности канала, то есть процента времени, когда канал работает. Скорости передачи данных, обеспечиваемые системами FSO, примерно такие же, как и у волоконно-оптических сетей, поэтому они наиболее востребованы в широкополосных приложениях на участке "последней мили". Беспроводные оптические системы используют диапазон инфракрасного излучения от 400 до 1400 нм. Идеология построения систем беспроводной оптики основана на том, что оптический канал связи имитирует отрезок кабеля. Такой подход не требует дополнительных протоколов связи или их модификации Оптическим системам присущи определенные характеристики, которые делают их довольно востребованными на рынке:
Построение всех инфракрасных систем передачи практически одинаково: они состоят из интерфейсного модуля, модулятора излучателя, оптических систем передатчика и приемника, демодулятора приемника и интерфейсного блока приемника. В зависимости от типа используемых оптических излучателей различают лазерные и полупроводниковые инфракрасные диодные системы, имеющие разные скорости и дальность передачи. Первые обеспечивают дальность передачи до 15 км со скоростями до 155 Мбит/с (коммерческие системы) или до 10 Гбит/с (опытные системы). Следует отметить, что с ужесточением требований к качеству канала дальность связи снижается. Вторые обеспечивают существенно меньшую дальность передачи, хотя по мере развития технологии дальность и скорость связи возрастают. [8]. 3.2. Средства навигации. История морской навигации уходит в глубь веков. Еще древние мореплаватели ориентировались по береговым маркерам, а вдали от берега - по звездам. Да, так можно найти путь домой, но для поисковых работ, где требуется точное позиционирование как объекта поиска на дне моря, так и своих собственных координат под водой, нужны принципиально иные методы навигации. Несмотря на технический прогресс, еще совсем недавно, полвека назад, средства навигации не обеспечивали необходимой точности позиционирования под водой. Из воспоминаний американских специалистов - поисковиков известно о трудностях, с которыми они столкнулись в 1963 году, когда на глубине 2560 м. затонула американская подлодка «Трешер», а в 1966 году у берегов Испании была потеряна водородная бомба. Точность подводного позиционирования не могла обеспечить точного повторного выхода к затонувшему объекту. Именно эти и подобные им инциденты привели к активному исследованию и разработке методов гидроакустического позиционирования. В дальнейшем, появление спутниковых навигационных систем еще больше усилили возможности навигации на море. В настоящее время навигационные комплексы НПА включают:
Спутниковые навигационные системы ГЛОНАСС и GPS (+ в перспективе Galileo) обеспечивают возможность быстрого и высокоточного определения координат морского объекта, синхронизации в пространстве взаимного положения различных объектов, определения скорости и направления движения объектов в реальном времени. С учетом широкозонных дополнений, таких как американская WAAS, европейская EGNOS, японская MSAS, точность позиционирования на поверхности моря может достигать 1-2 м. Однако, когда НПА погружается под воду, связь со спутником прекращается. Тогда положение НПА определяется методом «счисления пути» посредством бортовых навигационных средств (компаса, датчиков скорости, датчика глубины, гироскопов), либо с помощью гидроакустического позиционирования. Гидроакустическая навигационная система позиционирования (ГАНС) представляет собой систему, состоящую из нескольких стационарных передающих гидроакустических маяков, установленных на морском дне и сопровождающем судне, маяка-ответчика на НПА и узла обработки информации. Впрочем, используются и другие способы размещения маяков. В зависимости от этого различают ГАНС с длинной базой (ГАНС ДБ), ГАНС с короткой базой (ГАНС КБ), ГАНС с ультракороткой базой (ГАНС УКБ), их комбинации и комбинации со спутниковой навигацией. ГАНС ДБ используют несколько маяков (транспондеров) с установленными на них акустическими приемопередатчиками. Эти маяки, расположенные в местах с известными географическими координатами, излучают звуковые волны, позволяя НПА определять дистанцию до них. Для работы системы в заданном районе необходимо использовать как минимум три акустических маяка. НПА производит триангуляцию для вычисления собственного положения относительно них. Для построения ГАНС ДБ используются три или более маяков, стационарно устанавливаемых на морском дне, на расстоянии примерно 500 метров друг от друга. Достоинства таких систем - высокая точность определения координат (субметровая точность), отсутствие влияния на точность волнения моря, неограниченная глубина использования. Недостатки - необходимость точной выставки маяков на морском дне, необходимость подъема их по окончании работ. Основное применение ГАНС ДБ - длительные работы по обследованию каких-либо подводных объектов, строительство и эксплуатация нефтедобывающих платформ, прокладка трубопроводов. ГАНС УКБ работает на принципе определения координат маяка - ответчика по дистанции и углу. Дальность действия таких систем доходит до 4000 м. Обычно при работах до 1000 м точность определения координат не хуже 10 м. Этого достаточно для определения местоположения НПА, однако недостаточно для выполнения сложных подводных работ по бурению или строительству. К достоинствам таких систем относят их сравнительно небольшую стоимость и мобильность. Их можно использовать практически на любом судне, вплоть до резиновой лодки, крепя приемо-передающую антенну (ППА) на штанге. К недостаткам относится высокая степень влияния качки на точность и работоспособность системы. Примером ГАНС УКБ может служить ГАНС TrackLink 1500 американской компании LinkQuest, которая представляет собой портативную переносную систему, способную работать с любых типов судов-носителей и небольших катеров. Несколько десятков приёмо-передающих элементов конструктивно объединены в едином корпусе, который может опускаться в воду непосредственно с борта судна-носителя. Такое построение, с одной стороны, позволяет достичь высокой точности позиционирования, а с другой стороны, снизить массогабаритные размеры системы и время подготовки её к работе, что является немаловажным при проведении поисково-спасательных операций. При выполнении подводных работ, требующих высокоточного позиционирования, например прокладке и обследовании трубопроводов, строительстве гидротехнических сооружений и нефтяных платформ и т.п., рекомендуется стационарно закреплять ППА на специальной штанге для спуска с борта или монтировать выдвижную штангу в корпусе судна. Такой способ крепления обеспечивает стабильное положение ППА относительно судна-носителя, особенно при работе на сильном волнении и течениях. Для установки на подводные объекты в состав ГАНС входят различные типы маяков-ответчиков, унифицированные по массогабаритным размерам и времени непрерывной работы. Питание маяков осуществляется от встроенных аккумуляторов или от бортовой сети подводных объектов. Использование современных технологии в производстве аккумуляторов питания обеспечивает длительную работу маяков-ответчиков в активном режиме. При длительном отсутствии сигналов-запросов с ППА маяк-ответчик автоматически переходит в режим ожидания для экономии ресурса аккумуляторов. Такой алгоритм работы обеспечивает длительное (до нескольких месяцев) нахождение маяка-ответчика под водой. Обработка всех сигналов с ППА производится в надводном блоке управления и отображения, который представляет собой стационарный компьютер или ноутбук. В отличие от большинства аналогичных систем, предлагаемых на рынке, кабель данных с ППА подсоединяется непосредственно к последовательному порту компьютера (ноутбука). Математическая и графическая обработка данных осуществляется с помощью специального программного обеспечения. На экране монитора в реальном масштабе времени выводятся текущие координаты подводных объектов, параметры и траектория их движения относительно судна-носителя. Программное обеспечение имеет возможность дополнительно обрабатывать и выводить на монитор данные с навигационной системы GPS и внешнего датчика качки. Данные приборы подключаются к ноутбуку через последовательный порт или блок сопряжения. Компания-производитель LinkQuest предлагает специальную модификацию ГАНС TrackLink 1500LC для работы с миниатюрными телеуправляемыми подводными аппаратами типа «СиБотикс». Такая система имеет специальную гидроакустическую антенну с защитой от поверхностных шумов способную работать с малых катеров или лодок и небольшой маяк-ответчик (вес в воде менее 200 г). Технические возможности системы позволяют осуществлять позиционирование подводного аппарата во всём диапазоне рабочих глубин. В состав комплекта ГАНС TrackLink 1500 входит:
Дополнительно могут поставляться:
Системы с короткой базой (ГАНС КБ) имеют несколько разнесенных друг от друга гидрофонов, расположенных в нижней части судна-носителя. Блок обработки, используя гидроакустические сигналы дистанции маяка-ответчика, выдает координаты подводного объекта в реальном масштабе времени. Достоинства такой системы - мобильность и достаточно высокая точность (около метра). Рабочая глубина ограничена 1000 м. Недостатки - требования к минимальной длине судна-носителя. Необходимость точной калибровки системы, большая чувствительность к волнению моря. В последнее время эти системы вытесняются более простыми и совершенными УКБ системами. В последние годы на рынке систем позиционирования появилась принципиально новая гибридная система, которая использует принципы построения ГАНС ДБ и КБ типа с одновременным сопоставлением координат по сигналам от DGPS (дифференциальной GPS). Рассмотрим такую систему на примере. Система гидроакустического позиционирования «GIB» (от английского GPS Intelligent Buoys) французской компании «ACSA» предназначена для определения текущих координат подводных объектов с большой точностью.
В основе работы системы используется принцип определения координат подводного объекта относительно нескольких надводных плавающих буёв, местоположение которых в свою очередь определяется с помощью системы глобального позиционирования GPS или ГЛОНАСС.
Плавающий буй состоит из гидроакустического приёмника (гидрофона) и приёмника GPS. На подводном аппарате устанавливается гидроакустический маяк с определённой частотой сигнала. Каждый буй определяет с помощью гидрофона пеленг и дистанцию до гидроакустического маяка. Одновременно, в строгой синхронизации по времени, полученным значениям приписываются текущие географические координаты буя. Все полученные данные в реальном масштабе времени пересылаются по радиомодему на пост слежения, расположенный на борту судна или на берегу. Специальное программное обеспечение с помощью математической обработки вычисляет реальные географические координаты подводного объекта, скорость и направление его движения. Все исходные и рассчитанные параметры сохраняются для последующей обработки, одновременно на экране монитора поста слежения выводится местоположение и траектория движения подводного объекта или объектов, судна-носителя и плавающих буев. Параметры и траектории движения могут отображаться либо в относительных координатах, например, относительно судна-носителя, либо в абсолютных географических координатах с нанесением непосредственно на электронную карту района проведения подводных работ.
При выполнении работ по обнаружению и подъёму фрагментов затонувших объектов гидрофоны, установленные на буях определяют также пеленг и дистанцию до гидроакустического маяка, затонувшего объекта. Координаты и глубина маяка отображаются на электронной карте поста слежения, и оператор может направлять подводные аппараты или водолазов к объекту, ориентируясь по данным, выводимым на мониторе. -"> http://www.bnti.ru/des.asp?itm=3469HYPERLINK "http://www.bnti.ru/des.asp?itm=3469&tbl=02.04"&HYPERLINK "http://www.bnti.ru/des.asp?itm=3469&tbl=02.04"tbl=02.04 Благодаря своей мобильности, высокой скорости развертывания и нетребовательности к типу судна обеспечения, такая система идеальна для выполнения спасательных и поисковых работ. Специальный модуль, прилагаемый к данной системе, позволяет пеленговать акустические сигналы с черных ящиков потерпевших аварию самолетов или вертолетов и осуществлять вывод на них водолазов или подводных аппаратов. Бортовые автономные средства навигации включают в себя: навигационно-пилотажные датчики (глубиномер, магнитный и гироскопический компасы, датчики крена и дифферента, измерители относительной и абсолютной скорости - индукционный и доплеровский лаги, датчики угловых скоростей) и инерциальную навигационную систему (ИНС), построенную на основе акселерометров и лазерных или оптоволоконных гироскопов. ИНС измеряет перемещения и ускорения НПА по трем осям и формирует данные для определения его географических координат, угловой ориентации, линейных и угловых скоростей. В заключение приведем пример навигационной системы автономного необитаемого подводного аппарата (АНПА) GAVIA . Навигационный комплекс состоит из бортовой, гидроакустической, спутниковой навигационных систем: - DGPS приемник с приемом поправок WAAS / EGNOS - 3-осевой индукционный компас, датчик ориентации с углом охвата 360°, датчики ускорений - ИНС с доплеровским лагом - Гидроакустическая навигационная система с длинной и ультракороткой базой. Бортовая система представляет собой комплексированную доплер-инерциальную систему, состоящую из высокоточной бесплатформенной инерциальной навигационной системы (ИНС) с лазерными гироскопами. ИНС корректируется данными доплеровского лага, который измеряет скорость аппарата над грунтом или относительно воды. Использование данных о высоте над грунтом, предоставляемых доплеровским лагом, позволяет АНПА выдерживать глубины, необходимые для выполнения съемки ГБО или фотографической съемки. Для получения позиции в надводном положении используется приемник DGPS. Гидроакустическая навигационная система обеспечивает определение АНПА с установленным маяком-ответчиком относительно приемо-передающей антенны, либо относительно установленных на дне маяков, излучающих сигналы в окружающую среду. В ближайшие годы, по нашему мнению, вполне вероятно появление нового метода навигации, основанного на применении технологии «дополненной реальности». Средства, реализующие данный метод, могут быть очень эффективными при позиционировании АНПА в условиях закрытых пространств, таких как интерьер затонувших судов, трубопроводов, бассейнов, а также в условиях сложных рельефов дна, расщелин, фьордов, гавань. Об этом методе вы можете прочитать в разделе 8. «Морская робототехника + доп. реальность». Статью "20.07.2013. Развитие морской робототехники в России и за рубежом" |
||
|
|
| Copyright by MorePC - обзоры, характеристики, рейтинги мониторов, принтеров, ноутбуков, сканеров и др. | info@morepc.ru |